4月19日亦庄半马:解读人形机器人竞赛的规则逻辑 在北京亦庄举办的人形机器人半程马拉
在北京亦庄举办的人形机器人半程马拉松赛场上,一个关键细节决定了冠军归属:最终排名并非依据冲线顺序,而是取决于经过加权计算的“净时成绩”。这套独特的竞赛规则,其设计初衷远不止于竞速。
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈

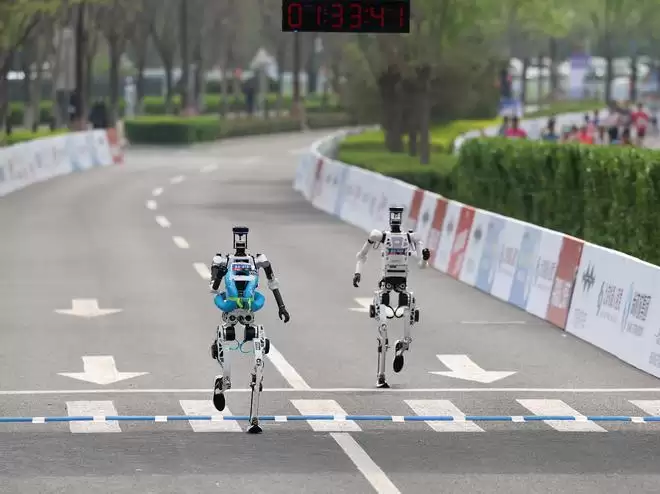
作为第二届“人机共跑”赛事,本届比赛直观展现了人形机器人运动能力的飞跃。从去年的步履蹒跚到今年的稳健疾驰,技术进步显著。冠军机器人50分26秒的加权成绩,甚至超越了人类男子半马世界纪录。这一成绩背后,赛事独特的计分与排名机制成为公众关注的焦点。

赛事采用流水线式单发起跑制。各队机器人根据排位赛结果,以约30秒的间隔依次出发,在专用赛道上独立完成比赛。这意味着,最早出发的种子选手并不等同于最终赢家。

本届赛事便是例证。绝影赤兔队的机器人率先出发并最早冲线,但因冲刺阶段摔倒影响表现,最终无缘奖台。冠军由第9位出发的齐天大圣队机器人夺得。

规则的核心在于“自主导航”与“遥控”双模式选择,并引入加权系数进行公平性校准:选择自主导航的机器人,其净时成绩乘以系数1.0;选择遥控方式的,净时成绩则乘以系数1.2。最终排名依据加权后的时间长短决定。

以实际赛果解析:最早撞线的绝影赤兔队因选择遥控模式,最终成绩为净时乘以1.2,因此排名落后。而采用自主导航的齐天大圣队,净时成绩即最终成绩。这一规则设计,实质上赋予了自主导航技术更高的权重与竞争优势。

加权系数在机器人赛事中已有先例。去年世界人形机器人运动会的百米赛,便对全自主参赛给予了0.8的奖励系数。

亦庄半马设定1.2系数的逻辑与此一致,旨在明确鼓励自主导航技术的研发。该技术难度更高,是机器人未来在非结构化环境中独立作业的关键。赛事通过规则杠杆,直接引导研发资源投向感知、决策等核心能力的突破,为人形机器人的实际应用铺路。
1.2这一具体数值经过严谨测算,设定为一个“困难但可达成”的工程挑战阈值。这意味着,选择遥控的机器人,其实际速度必须显著优于自主导航对手(超过20%)才可能胜出。这一比例在激励技术竞争的同时,确保了赛事的公平性与导向性。
除加权系数外,精细化的罚时规则同样体现赛事的技术导向。规则逐年演进,细节值得关注。
1. 能源补给规则
今年规则收紧:原地换电将导致罚时(首次5分钟,二次10分钟,累进)。而在指定补给站换电,则不计罚时。此举旨在引导队伍优化能源管理策略,并规范比赛流程。

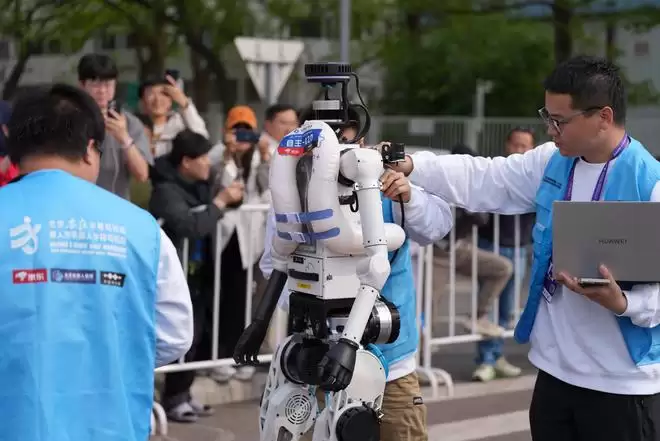
2. 机器人更换规则
处罚力度加大。更换机器人的罚时从去年的首次10分钟、二次15分钟,提升至今年的首次15分钟、二次20分钟。阶梯式加重处罚,旨在提升机器人的完赛可靠性。

规则对操作边界有严格限定:自主导航机器人起跑后需全程自主运行,仅在故障或安全风险等经裁判确认的特殊情况下方可人工干预。遥控操作则需在指定跟随车内规范进行。这些细则共同构成了一个高压测试环境,直接推动机器人在续航、稳定性等工程指标上持续优化。

综上所述,本届赛事规则的深层逻辑清晰:利用半程马拉松这一高强度、长距离的真实场景进行系统性压力测试。通过加权系数与罚时规则这套组合杠杆,赛事强力引导研发方向,鼓励自主导航核心技术突破,并间接促进高能量密度电池等关键部件的迭代。其终极目标,是加速培育出能够在复杂现实中可靠工作、为各行业赋能的新一代人形机器人。

记者:李春宇、张骁、吉宁
图片:王丽莉、鞠焕宗、张晨霖、谢晗、雒圆
菜鸟下载发布此文仅为传递信息,不代表菜鸟下载认同其观点或证实其描述。