高德地图进军具身智能:一次深思熟虑的升维 当国民级导航应用宣布涉足机器人领域,外
当国民级导航应用宣布涉足机器人领域,外界的第一反应往往是跨界与噱头。然而,高德此次发布的ABot全栈具身技术体系,标志着其已跻身全球技术第一梯队。
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈

深入剖析后我们发现,这绝非跟风之举。高德发布的首个面向AGI的全栈具身智能体系ABot,其核心价值在于提供了一套完整的解决方案,旨在让机器人从实验室演示走向真实世界的实用化。当业界多数玩家仍在聚焦单点技术突破时,高德已经完成了从底层数据、核心模型到上层智能体应用的全链路贯通。
更为关键的是,凭借其在地图业务中沉淀的底层数据优势,高德的世界模型在CVPR 2026 Video World Model Workshop的国际挑战赛中,得分超越了谷歌、英伟达等巨头。ABot体系在具身智能领域横扫15项SOTA指标,确立了其领先地位。
这自然引出一个核心问题:一家导航公司,为何能在硬核的机器人智能赛道实现领跑?
答案的起点确实是数据,但终点远不止于此。审视ABot的技术架构,其底层是数据层(ABot-World可交互世界模型),之上是模型层(导航基座ABot-N与执行基座ABot-M),顶层则是Agent层(机器人操作系统ABot-Claw)。
然而,真正的突破并非数据规模,而是范式迁移。高德构建了一个“物理优先、动作可控、闭环进化”的机器人世界操作系统,实现了从“视觉渲染范式”到“可微分物理引擎范式”的根本性转变。
当其他模型致力于生成视觉上逼真的视频时,ABot-World的核心是输出符合物理规律的动态过程。它不仅模拟“发生了什么”,更能解释“为何发生”以及“如果干预会怎样”。这种对物理规律的深度建模,使其成为全球唯一在物理合规性、动作可控性与零样本泛化能力三项核心指标上均达到顶尖水平的模型。
因此,高德的领先是“范式创新”、“系统工程能力”与“物理智能内核”三者结合的结果。

面对“让机器人理解真实物理世界”的终极难题,高德摒弃了传统的“采集-标注-训练”流水线,选择了“重建物理世界”这条新路径。
传统方法依赖人力或遥控采集,成本高昂且场景有限。高德的思路是:与其让机器人在现实中缓慢试错,不如先在数字世界中高效、批量地生成所有必要的物理交互训练场景。
这正是可交互世界模型ABot-World的使命:构建一个可交互、可推演、可自主进化的机器人世界操作系统。
这不同于传统的数据合成或仿真。传统仿真追求“无限逼近真实”,而高德是基于已有的高精度真实世界数据,进行物理级精度的还原与重建,直接为机器人提供训练环境。这本质上是将其“精密理解与重建物理世界”的地图核心能力,向底层延伸,为机器创造了一个可“理解”与“交互”的数字训练场。

那么,这一原理如何具体落地?
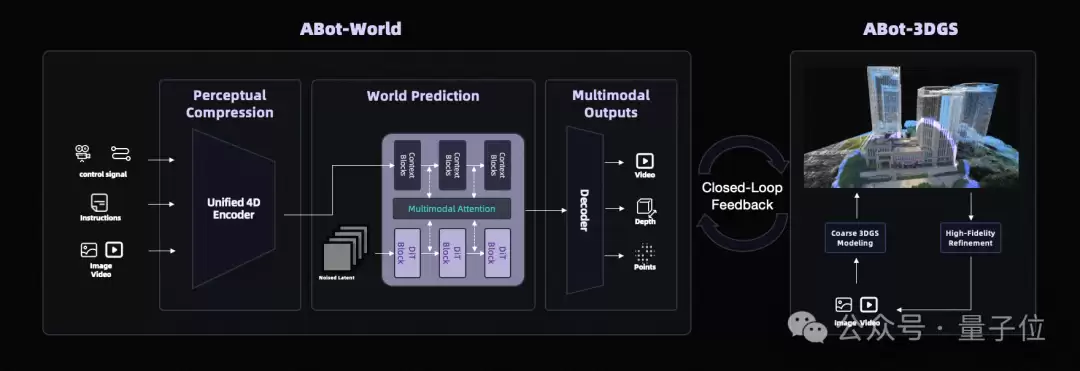
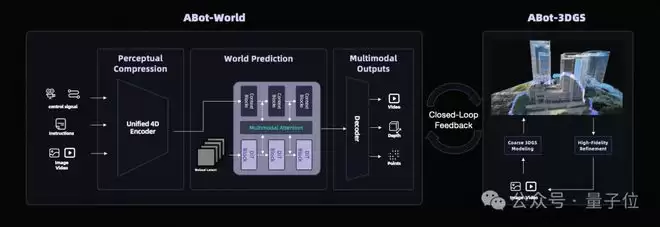
ABot-World由双引擎驱动:ABot-3DGS(物理世界数字孪生工厂)与ABot-PhysWorld(因果推演物理思维引擎)。这并非简单的“数据生成+模型训练”,而是一套完整的物理智能操作系统。
ABot-3DGS首先对传统数据生产方式进行了革新。它基于高德积累的厘米级空间与真实轨迹数据,融合3D高斯泼溅技术,构建出可编程的数字孪生空间。
“可编程”是关键。这意味着可以不受现实条件限制,生成任意视角、光照、遮挡状态下的数据,并能灵活切换机器人形态。该系统能系统性构造并覆盖那些导致机器人出错的“长尾交互场景”,将场景覆盖率提升至99%,让模型在部署前就充分训练。
更重要的是,所构建的空间自带物理属性(如质量、摩擦系数),形成一个可计算、可干预的物理环境。通过调整参数,可以模拟不同物理条件下的交互结果,从而生成物理一致性极高的训练数据。
因此,ABot-3DGS是一个能主动创造比现实更丰富、更可控的“训练宇宙”的系统。
高德的真实时空数据转化为机器人训练材料,经历三个步骤:翻译、重建、运行。
“翻译”是将原始数据转化为机器可读的“多模态Clip”。例如,一个路口数据包包含视觉图像、红绿灯空间位置与状态、用户行为意图及周边动态。高德拥有海量此类Clip。
随后,ABot-3DGS将这些场景重建为万级规模的3D数字场景,因其基于带物理规则的数据,所以场景是“活”的。
最后“运行”阶段,将机器人置入场景执行指令,即可批量生成千万级的高质量训练轨迹数据。
接下来的核心是让机器人“理解”物理规律,这是ABot-PhysWorld的任务。
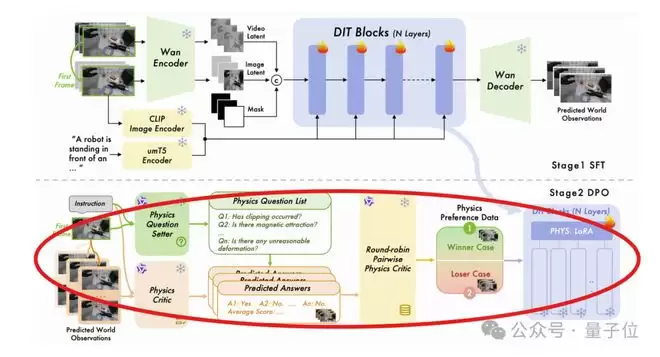
ABot-PhysWorld基于140亿参数DiT构建,是一个物理思维引擎,用于回答“如果我执行此动作,将发生什么?”
其创新体现在三个层面:
数据层面,精选300万条真实操作视频,采用VLM与LLM进行双阶段标注,构建了四层物理语义结构(意图→动作→轨迹→物理关系),为因果推理奠定基础。这套标注体系解释了“为什么发生”。

训练层面,摒弃了传统的MLE(优化像素相似度)方法,引入“物理判别机制”。通过Proposer模块列出物理规则,Scorer模块对生成结果进行物理合规性打分,并利用Diffusion-DPO技术强化合规行为。模型从而学会区分物理上合理与不合理的动作。
输出层面,ABot-PhysWorld生成的每一帧都是包含质量、接触力场等信息的可微分物理状态快照。这支持“动作条件化推演”与“零样本泛化”。即使面对全新物体或机器人形态,也能基于通用物理规律做出合理判断。
这套组合拳从根源上减少了物体穿透、反重力悬浮等低级物理错误,因为机器人开始理解动作背后的“因果”。
双引擎协同,形成了持续增强的“数据-模型”飞轮:ABot-3DGS制造高质量数据,ABot-PhysWorld学习物理规律。同时,ABot-World是一个具备自我修正能力的认知基座,支持完整的VLA闭环:预测→执行→反馈→修正。机器人能在真实交互中持续进化,降低对人类演示数据的依赖。
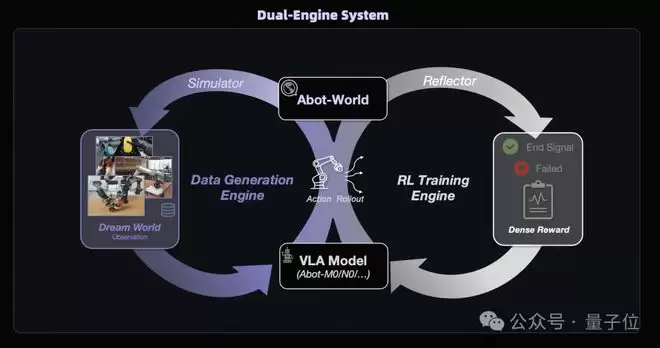
高德的方法论由此清晰:以“可交互世界模型”为核心思路,由ABot-3DGS通过“翻译-重建-运行”提供数据,由ABot-PhysWorld确保物理对齐。
本质上,高德解决了两大关键问题:大幅降低高质量数据生产成本,并将“物理正确性”深植系统内核。“量大”与“质真”的结合,使模型学习到更通用的物理规律,为攻克具身智能的终极挑战——泛化问题——提供了坚实基础。
高德能在此领域领先,并非简单跨界,而是其核心能力的自然升维:从为人类提供导航,到为机器人构建物理世界操作系统。
其护城河在于地图时代锤炼出的空间理解、地图构建与实时更新能力。其中,业界领先的POI数据库和富含语义的路网信息尤为关键。
高德提供给ABot-World的数据是带有“语义”的——不仅包含几何坐标,更包含“这里是入口”、“前方是人行横道”等语义锚点。
这一点至关重要。多数机器人导航训练仅使用几何与视觉特征,导致机器人“知其然不知其所以然”。它们能学会从A点到B点,但难以理解为何需要绕行或暂停。一旦环境动态变化,就容易失效。
带有语义的数据,相当于将交通规则与环境常识一并教授给机器人。这也是为什么基于此训练的机器人更易落地。例如,高德的四足机器狗已能在北京亦庄为视障人士提供精准的户外导航引导。

从地图时代到具身智能时代,高德的角色内核一以贯之:它始终是连接实体世界与数字世界的基础设施。过去连接人与现实,现在连接机器人与物理世界。服务对象变化,能力边界得以极大拓展。

更具行业意义的是,高德已决定将ABot-World开源。它旨在提供一个统一、物理合规、可进化的机器人世界模型操作系统,降低所有开发者的入门门槛。
从这个角度看,高德亮出的不仅是一款产品,更是下一代机器人智能的底层平台。行业无需重复“造轮子”,数据不足与仿真失真的痛点将得到系统性缓解。一个统一的“操作系统”正在形成,生态将围绕此底座快速收敛并加速发展。
高德的战略清晰:筑牢底层底座,同时牵引生态繁荣。当整个行业基于此体系创新时,它便占据了赛道最核心的位置。
2026年,具身智能赛道融资火热,竞争激烈。但历史表明,当行业在底层基础设施上趋于收敛,竞争格局将迅速明朗。
正如TCP/IP统一网络、Linux成为操作系统标准、云计算普及算力,具身智能正处在从“百花齐放”走向“生态收敛”的临界点。
高德已经率先出招。横扫15项SOTA、实现“全球唯一三项指标全面领先”、发布首个“物理优先”的世界模型操作系统……这些成就不仅是技术实力的证明,更宣告其已稳居产业牌桌。
无论未来赛场如何演变,高德已然为行业铺就了通往AGI时代的第一块坚实基石。
菜鸟下载发布此文仅为传递信息,不代表菜鸟下载认同其观点或证实其描述。