










星空计划汽车发布自动驾驶方案 采用激光雷达与VLM大模型等技术

摘要
星空计划汽车携手星河问途,发布SEWE高级自主大脑 来源:环球网 最近,星空计划汽车在硅
星空计划汽车携手星河问途,发布SEWE高级自主大脑
来源:环球网
最近,星空计划汽车在硅谷的全球发布会上,揭晓了其未来将搭载的自动驾驶技术核心——来自星河问途(ASTROX)的SEWE Advanced Autonomous Brain,即SEWE高级自主大脑。这套系统瞄准的是未来的“出行机器人”场景,目标很明确:打通智能座舱、智能驾驶决策和智能底盘控制之间的壁垒,构建一个系统级的闭环架构。值得一提的是,星河问途的核心团队源自国内自动驾驶领域,拥有从算法、系统到产品的全栈技术能力和宝贵的量产经验。
按照星河问途的阐述,当前行业的主流智能驾驶系统,其焦点大多还停留在“驾驶”这个单一任务上。然而,随着智能座舱和智能底盘技术的飞速进步,汽车的角色正在发生根本性转变——它正从传统的交通工具,演进为具备感知、理解、决策、执行和交互能力的智能体。SEWE高级自主大脑的出发点,正是这种全局视角,它试图重新梳理智能驾驶与座舱、底盘三者之间该如何协同工作。
那么,面向未来的智能驾驶系统究竟需要哪些核心能力?品牌方提出了三个关键维度:首先,它必须具备可解释、可视化的推理与决策能力,不能是个“黑箱”;其次,它需要拥有超越简单模仿学习的自主学习与泛化能力,以应对层出不穷的复杂场景;最后,它得能理解人类的自然语言和意图,并能与智能底盘高效协同,灵活满足不同驾驶情境下的需求。
三大系统构成技术基石
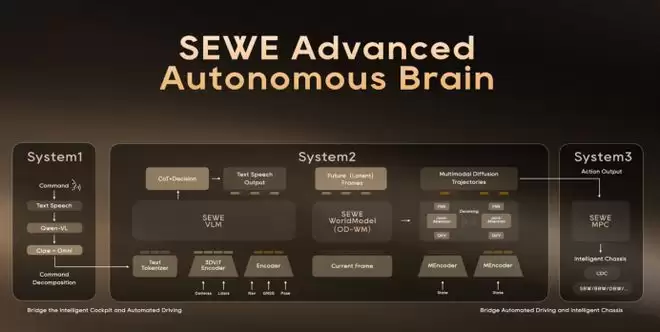
SEWE高级自主大脑由三大支柱系统构成:
第一,是面向座舱交互的任务理解系统。 这套系统利用大语言模型与AI智能体技术,能够将用户用自然语言发出的指令(比如“我有点冷,找个能晒太阳的停车场”),拆解成一系列可执行的具体任务。更重要的是,它为未来接入更多样的技能和服务预留了开放空间。
第二,是以大模型为核心的智能驾驶决策系统。 它集成了视觉语言模型(VLM)与端侧世界模型,在保证实时响应的同时,也追求强大的场景泛化能力。同时,系统引入了思维链(CoT)等技术,旨在提升决策过程的透明度与可解释性,让“AI为何这样开车”变得有迹可循。
第三,是面向车辆执行的智能控制系统。 该系统率先采用了模型预测控制(MPC)技术,将智能底盘上多个执行器(如转向、制动、悬架)的协同控制,纳入一个统一的优化框架中。这样一来,系统就能更好地适配来自上游的多模态轨迹规划和复杂控制指令。
技术路线:激光雷达优先,端云协同进化
在感知技术路线的选择上,星河问途表示其思路是回归“第一性原理”,优先采用了激光雷达方案。发布会上亮相的,是由星空计划汽车与合作伙伴联合开发的旗舰级激光雷达产品DHX1。它的参数相当亮眼:最高支持4320线全彩4K感知,最远测距可达600米,即使在10%的低反射率条件下,测距也能达到400米。这意味着,它能够识别300米外的交通水马、280米内的小动物等细小目标,为系统提供了极其丰富和精确的环境信息。
在视觉语言模型(VLM/VLA)与世界模型的融合方面,星河问途认为两者在现阶段应紧密结合、相辅相成。具体策略是:在车端(端侧)集成VLM/VLA模型与轻量化的世界模型,实现实时感知与局部推演;在云端,则构建以世界模型为核心的数据闭环体系,结合强化学习进行大规模的仿真训练和轨迹评价,驱动系统持续进化。
云端飞轮:驱动系统自我进化
为了赋予系统持续学习的能力,星河问途在云端搭建了名为“SEWE自进化飞轮框架”的体系。这个框架通过世界模型和强化学习技术,让整个系统能够像滚雪球一样,利用真实数据不断自我优化和迭代。在其数据闭环中,还引入了多类AI助理引擎,例如用于自动挖掘高价值数据、自动化数据标注、以及融合检索增强生成(RAG)等工具,这些都将大幅提升技术迭代的效率。
可以预见,随着技术方案的明确,星河问途将持续推动SEWE高级自主大脑在高阶智能驾驶领域的技术深耕与商业化落地。这场发布会,无疑为未来智能汽车的“大脑”该如何构建,提供了一个清晰而富有野心的技术蓝图。
来源:互联网
本网站新闻资讯均来自公开渠道,力求准确但不保证绝对无误,内容观点仅代表作者本人,与本站无关。若涉及侵权,请联系我们处理。本站保留对声明的修改权,最终解释权归本站所有。
