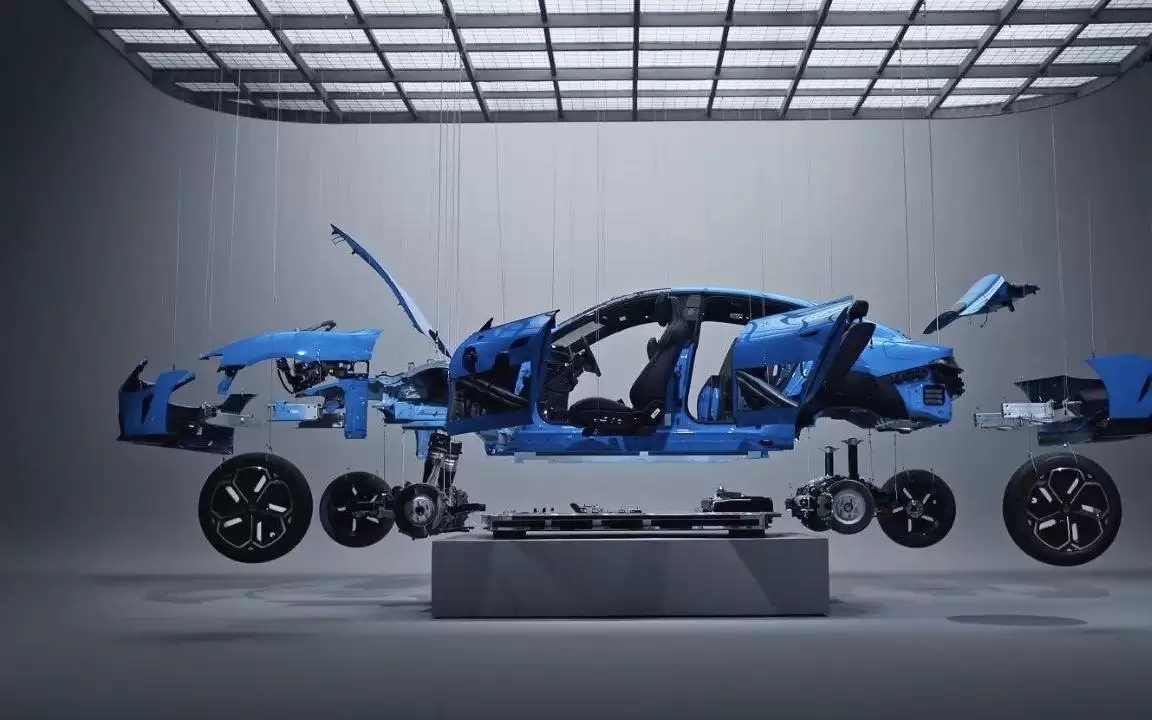
小米SU7智驾硬件解析:多传感器融合如何实现环境感知 4月9日,小米汽车发布技术解读,深
4月9日,小米汽车发布技术解读,深度剖析了小米SU7顶配车型的辅助驾驶传感器架构。这套系统如何运作?其核心在于多传感器融合——各类硬件如同精密协作的感官,为车辆构建出实时、立体的环境模型。
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈

系统通过明确分工与冗余互补,集成了1颗激光雷达、1颗4D毫米波雷达、11颗高清摄像头及12颗超声波雷达。这套感知网络的核心任务,是为小米XLA计算架构提供高精度、高可靠性的环境数据,支撑后续的路径规划与车辆控制决策。
位于车顶的激光雷达是前向感知的关键。它扮演着三维扫描仪的角色。

其核心价值在于精确测距与三维轮廓重建。无论是车道线、路肩,还是前方障碍物的几何形态,都能被其精准捕获,将二维图像提升为可量化的三维点云数据。
该硬件的显著优势在于环境光独立性。在夜间或隧道等低光场景下,它依然能稳定输出探测结果,有效弥补了纯视觉方案在暗光条件下的性能衰减,提升了夜间辅助驾驶的可用性与安全性。
其200米的有效探测距离,为高速巡航及应对前方突发状况提供了充裕的感知缓冲与安全冗余。
新一代SU7在前保中部集成了一颗4D毫米波雷达,这是感知能力的重大升级。

传统3D毫米波雷达缺乏高度维信息,易将高架桥、路牌与地面静态物体混淆,导致误刹车。4D毫米波雷达通过增加俯仰角测量,实现了目标的高度分辨能力。
这意味着系统能有效区分悬空的路牌、桥梁与地面的井盖、减速带,大幅降低了误报率。更重要的是,它能精确测量目标的径向速度、相对距离及运动轨迹。
在高速跟车或切入切出场景中,这种能力至关重要。雷达可提前判断相邻车道车辆的加速或减速趋势,为决策算法提供关键的时序预测信息,争取更多的反应时间。
毫米波对雨、雪、雾等恶劣天气穿透力强,且在目标被部分遮挡时仍能工作,这显著增强了智驾系统的全天气鲁棒性。
简言之,激光雷达精于静态空间结构,而4D毫米波雷达则强于动态目标的速度与轨迹感知。两者数据融合,构成了稳健的前向感知基石。
车身的11颗高清摄像头,包含7颗周视摄像头与4颗环视摄像头,构成视觉感知主体。

7颗周视摄像头覆盖远距、广角感知。它们负责识别车道线、交通标识、信号灯、车辆、行人及非机动车,为系统提供丰富的语义化环境信息。
4颗环视摄像头部署于车身四周低位,专注于近场盲区监测。在泊车、窄路通行、路口起步等低速场景下,它们提供车身周边厘米级的图像信息,有效消除视觉死角,提升低速操控的安全性与便利性。
最后一道近距离感知由12颗超声波雷达完成。它们密集部署于车辆前后保险杠及侧方:牌照框两侧2颗、前保角部4颗、后保角部4颗、后尾门下沿2颗。

其专长在于精确测量极近距离(通常几厘米至数米)的障碍物。在自动泊车、低速蠕行及狭小空间挪车时,超声波雷达提供不可或缺的近距离测距数据,是防止剐蹭的最后一道传感器防线。
整体来看,这套传感器系统的协作逻辑清晰:激光雷达提供三维点云,4D毫米波雷达输出动态矢量,高清摄像头解析语义信息,超声波雷达把控近场距离。

它们并非简单堆叠,而是通过深度融合算法,实现优势互补与冗余校验,共同为小米SU7的智能驾驶决策层提供稳定、连续、高精度的环境感知输入。
菜鸟下载发布此文仅为传递信息,不代表菜鸟下载认同其观点或证实其描述。