








其他资讯
宇树H1机器人半马赛场终点“累倒”,现场视频:工作人员紧急用担架将其抬离

摘要
宇树H1机器人半程马拉松终点突发姿态失控,现场担架紧急处置 在北京亦庄举办的半程马拉
宇树H1机器人半程马拉松终点突发姿态失控,现场担架紧急处置

免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
在北京亦庄举办的半程马拉松赛道上,宇树H1人形机器人的表现引发了业界高度关注。据《科创板日报》记者现场直击,4月19日正赛期间,该机器人在接近终点线时突发动态平衡失效,姿态出现剧烈晃动后最终倾覆倒地。
赛事保障团队随即启动应急程序,使用专用担架将这台失去行动能力的机器人移出赛道。值得关注的是,在此前的排位赛中,这款H1机器人曾以出色的运动性能被视为夺冠潜力机型。此次从稳定运行到突发故障的转折,直观呈现了足式机器人动态控制与环境适应性的核心挑战。

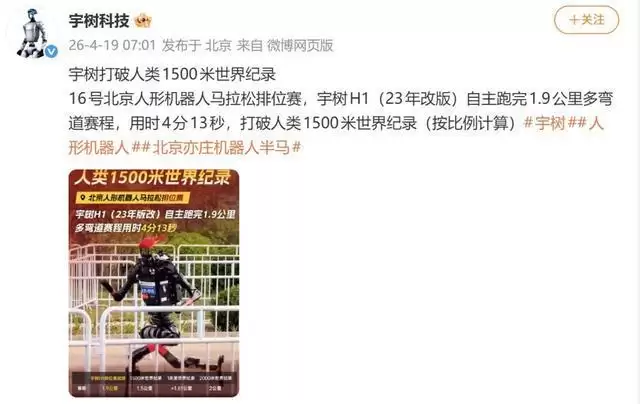
事实上,就在赛事当天早些时候,宇树科技官方通报了该机器人的一项突破性表现:在16日的排位赛中,经过2024年改版的H1机器人自主完成了1.9公里多弯道复杂路径,耗时仅4分13秒。按比例折算,其移动速度已超越人类1500米世界纪录水平。这一性能数据与赛场突发状况的并置,精准揭示了人形机器人技术研发的双重现实:实验室环境下的算法突破与真实场景中的鲁棒性考验,往往共同定义着技术的成熟度曲线。
来源 | 财联社、科创板日报、宇树科技
原标题:《宇树H1机器人半马赛场终点“累倒”,现场视频:工作人员紧急用担架将其抬离》
栏目主编:张武 文字编辑:傅璐
来源:作者:扬子晚报
来源:互联网
免责声明
本文内容整理自公开资料与网络信息,仅供学习和参考使用。正式发布或转载前,请结合原始来源、发布时间和实际场景进一步核验。
