只需5000美元就能打造人形机器人?uc伯克利又有新动作!镜头前这位认真书写名字的小家伙,正是UC
只需5000美元就能打造人形机器人?uc伯克利又有新动作!
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
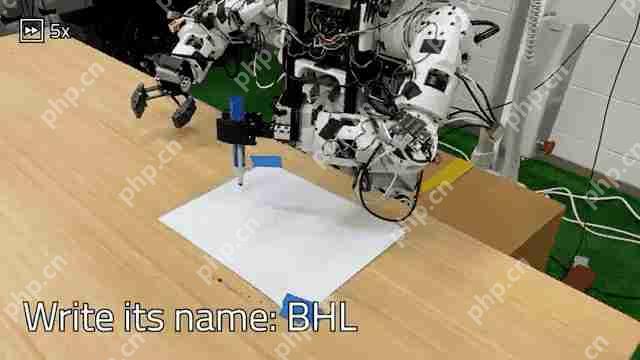
镜头前这位认真书写名字的小家伙,正是UC伯克利最新研发的作品——人形机器人Berkeley Humanoid Lite(BHL)。它那专注的模样仿佛在宣告:“Hello world!”
身高不到一米,重量轻便,但BHL具备低成本、全开源及高度可定制三大亮点。
话不多说,直接看视频吧:
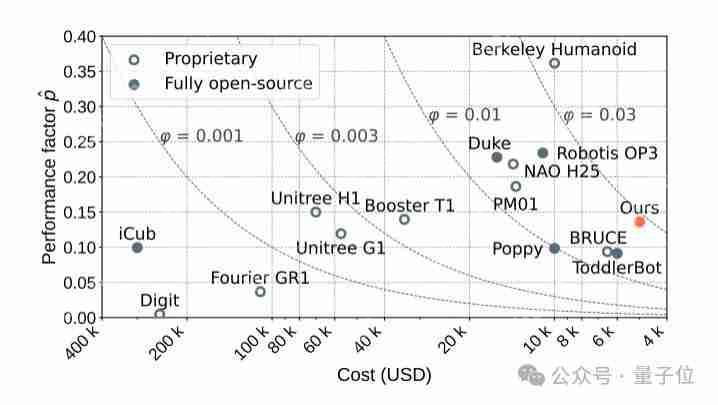
整体成本低于5000美元,所有组件均可通过3D打印或在线购物平台(比如亚马逊、淘宝)轻松购得,相比同类产品,它以较低的成本实现了卓越性能。
众多网友跃跃欲试,准备立即动手复制:

值得一提的是,该研究论文已被机器人领域的顶尖会议RSS 2025接收,详细信息可见文末链接。
那么BHL是如何做到这一切的呢?让我们继续探索。
BHL核心技术解析
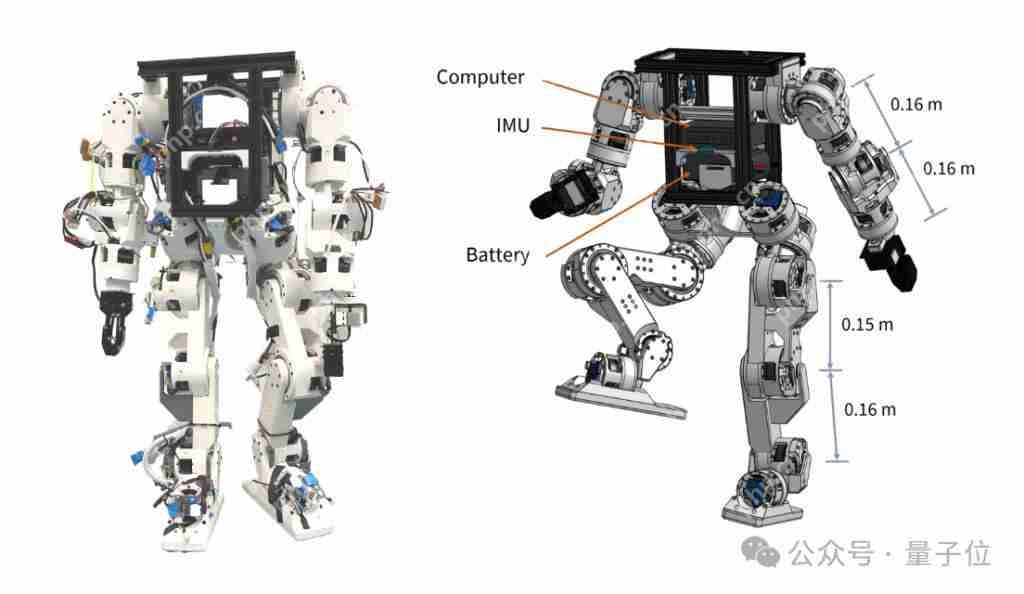
BHL的设计核心在于低成本制造与灵活调整能力,使用两种类型的3D打印关节执行器驱动,并辅以铝合金框架支撑,机械效率达到90%。
英特尔N95迷你PC作为主控单元,手机级别的IMU用作姿态传感器,一块6S 4000mAh的锂聚合物电池提供动力。
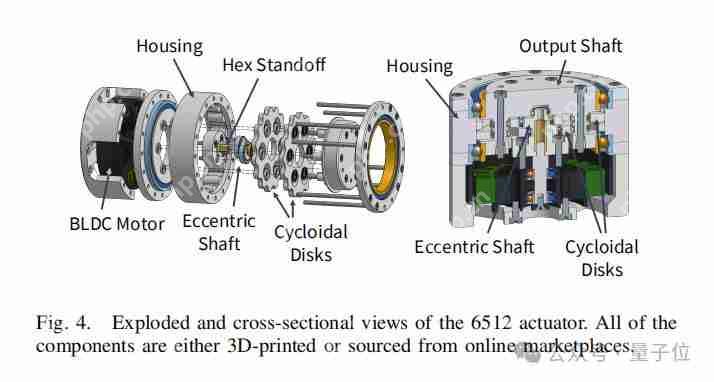
摆线齿轮技术
BHL采用了3D打印执行器驱动方案,使得执行器的生产摆脱了传统复杂且昂贵的加工方式,无论是在普通实验室还是个人爱好者的家中,只要有3D打印机即可自行制作部件,极大降低了硬件获取难度。
然而,3D打印也有缺点——材料限制可能影响耐用性。
为此,团队引入摆线齿轮设计,优化执行器结构,在3D打印材料特性和足够的机械强度之间找到平衡点。
具体而言,利用摆线减速器特性,将负载均匀分布到多个齿轮齿上,使其更适合桌面级3D打印机的有限分辨率。额外的加固措施,例如贯穿螺钉与嵌入式黄铜六角支架,可以防止层间边界失效并提高整体承重能力。部分零散零件也被整合到一起打印,以减轻重量并避免紧固件周围产生应力集中。
与此同时,研究团队还对执行器的各项性能进行了测试验证,包括功率效率、传动刚度、耐久性、单元间一致性以及位置跟踪精度等指标,确保其可靠性。
模块化架构
针对不同应用场景的需求,BHL的各个功能模块既独立运作又紧密配合,用户可以根据需要自由挑选和组合不同的模块,获得个性化的定制体验。
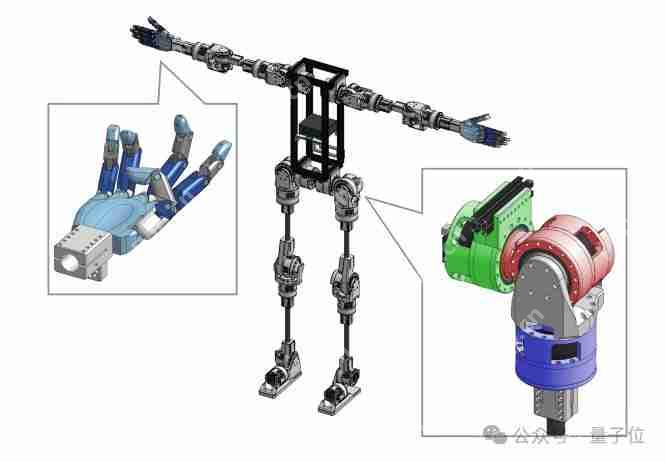
此外,BHL只需要电源线和CAN信号线就能串联多个执行器,从而轻松转变为双足、四足、半人马构型或移动基座平台等多种形态。

难怪网友们戏称BHL是把科幻电影变成了现实:

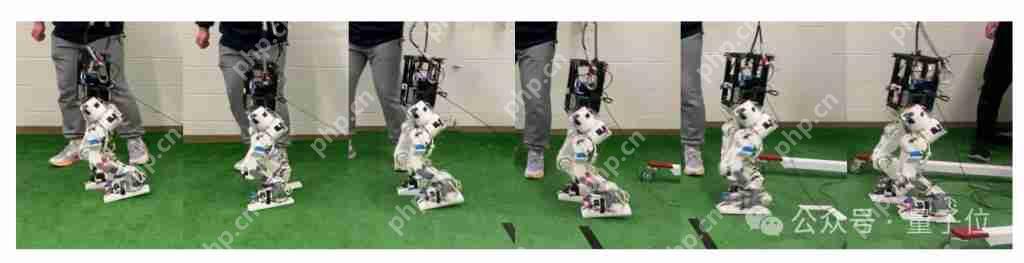
实际效果展示:腿部运动
在双足连续行走测试中,BHL表现优异,动作敏捷。

它严格遵循用户设定的速度指令,且实验过程中仅占用了执行器扭矩极限的30%,这意味着执行器未来还有潜力支持更大规模的人形机器人。
远程操控
团队开发了一套基于SteamVR基站和控制器的运动捕捉遥操作系统,提供无头模式与VR模式两种操作方式。
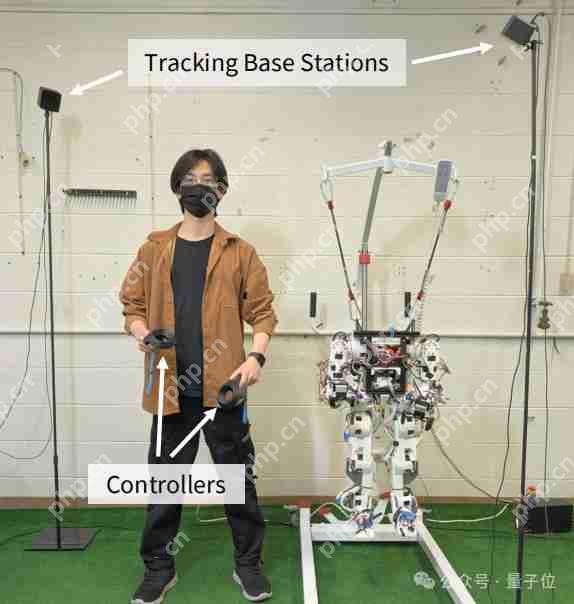
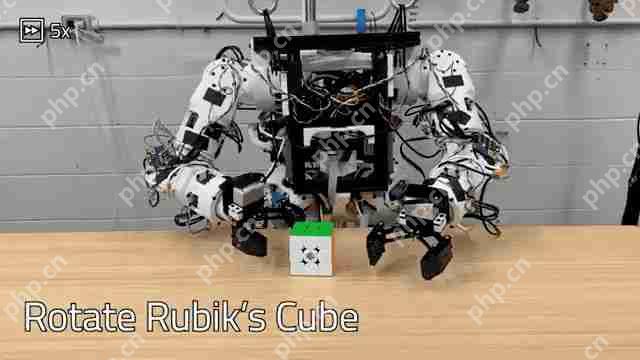
借助这套系统,用户能够远程操控BHL,完成精确的动作执行和复杂任务操作,比如:
轻松还原三阶魔方。
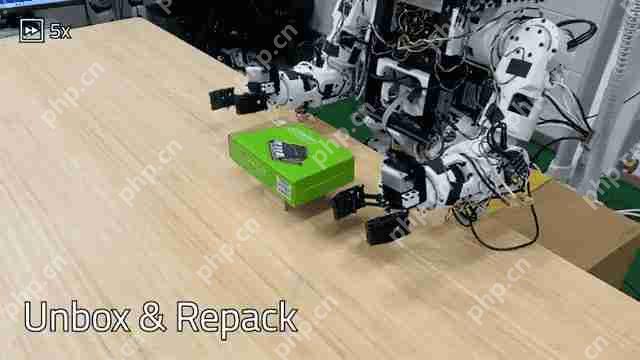
逐一抓取堆叠的各种积木,并放入盒子中。

从盒子里取出物品,然后整齐地放回原处完成打包。
因此,研究团队认为BHL在未来工程教育与动画领域具有广阔的应用前景,教师们对此充满期待:

智慧背后的创新精神
最后来看看这个优秀的研究团队,由四位华人主导,分别是Yufeng Chi、Qiayuan Liao、Junfeng Long和Xiaoyu Huang。
他们目前都是UC伯克利的博士生,专注于机器人控制系统的研究。
另外,团队还在进行Berkeley Humanoid项目,据成员透露,未来两个项目都会有进一步的发展计划,感兴趣的朋友可以持续关注~也可以在评论区留言交流!
论文地址:https://www.php.cn/link/70431822025c237eddc9145838fc7046
项目地址:https://www.php.cn/link/18ebf96a2f92ee2fb5a254536239cc38
代码地址:https://www.php.cn/link/9863c2d1f9c2fd8e0e10ba7838592b73
文档地址:https://www.php.cn/link/927a76a0841cbed3ee15f5f1a3a25898
— 完 —
量子位AI主题策划正在进行中!欢迎参与专题365行AI落地方案,一千零一个AI应用,或者与我们分享您所寻找的AI产品,亦或是发现的新动向。
同样欢迎您加入量子位每日AI交流群,一起探讨AI话题~
一键关注点亮星标
科技前沿进展每日见
一键三连「点赞」「转发」「小心心」
欢迎在评论区留下您的看法!
菜鸟下载发布此文仅为传递信息,不代表菜鸟下载认同其观点或证实其描述。

相关文章
更多>>










热门游戏
更多>>




热点资讯
更多>>热门排行
更多>>- 天道仙尊游戏版本排行榜-天道仙尊游戏合集-2023天道仙尊游戏版本推荐
- 灵汐缘2手游2023排行榜前十名下载_好玩的灵汐缘2手游大全
- 口袋觉醒题材手游排行榜下载-有哪些好玩的口袋觉醒题材手机游戏推荐
- 龙之神途手游排行榜-龙之神途手游下载-龙之神途游戏版本大全
- 梦中的你手游排行榜-梦中的你手游下载-梦中的你游戏版本大全
- 永恒战士排行榜下载大全-2023最好玩的永恒战士前十名推荐
- 炎黄大陆手游排行榜-炎黄大陆手游下载-炎黄大陆游戏版本大全
- 山海夜行手游2023排行榜前十名下载_好玩的山海夜行手游大全
- 类似白蛇问仙的手游排行榜下载-有哪些好玩的类似白蛇问仙的手机游戏排行榜
- 荒岛生存最新排行榜-荒岛生存手游免费版下载-荒岛生存免费破解版下载
- 圣武逍遥手游2023排行榜前十名下载_好玩的圣武逍遥手游大全
- 一念永恒最新排行榜-一念永恒手游免费版下载-一念永恒免费破解版下载