STM32如何通过软件模拟串口通信?
在stm32上,通过软件模拟串口通信是完全可行的,即使不使用硬件串口引脚(如rx、tx)也能实现。
在stm32上,通过软件模拟串口通信是完全可行的,即使不使用硬件串口引脚(如rx、tx)也能实现。
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
 关键在于精确控制GPIO的时序、波特率、数据位和停止位来完成数据传输。
关键在于精确控制GPIO的时序、波特率、数据位和停止位来完成数据传输。
这种方法适用于没有USART硬件支持的场景,或者当其他硬件资源已被占用时。
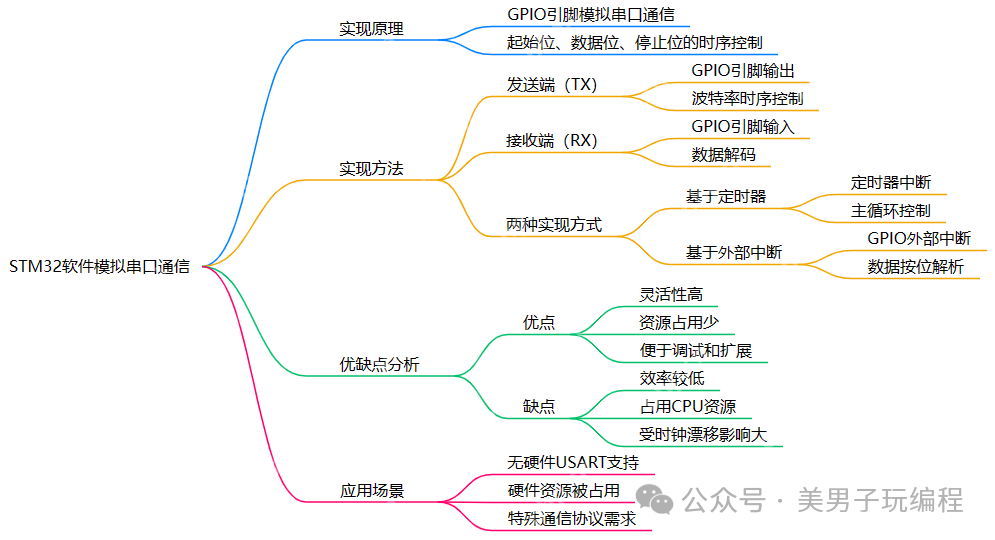
软件串口通信通过控制一个普通的GPIO引脚来模拟串口通信的时序。
它模拟的过程包括发送和接收的时钟控制、数据位的编码和解码、起始位和停止位等内容。
例如,使用一个GPIO引脚作为TX(数据发送端),另一个作为RX(数据接收端)。
 在数据传输时,TX端会根据约定的波特率按照特定的时序(起始位、数据位、停止位等)发送数据。
在数据传输时,TX端会根据约定的波特率按照特定的时序(起始位、数据位、停止位等)发送数据。
接收端RX则需要在固定的时钟节奏下读取数据并解码。
通常实现方法有两种:
基于定时器的实现:通过定时器生成精确的时间间隔,确保每一位数据的传输时长精确匹配所选波特率。例如,配置一个定时器以精确产生特定频率的时钟信号,利用定时器的中断或直接在主循环中进行波形控制,从而模拟串口的发送和接收。基于外部中断的接收:接收端可以通过GPIO引脚配置为外部中断模式,当引脚电平变化时,触发中断并在中断服务程序中读取数据。由于接收的数据是按位传输的,因此需要在中断中管理每一位的接收,并按照约定的波特率来解析数据。软件串口通信的优缺点优点:
灵活性高:不需要硬件的USART引脚,任何GPIO引脚都可以用来进行通信,适用于没有USART硬件支持的情况。占用资源少:仅通过软件来实现,硬件资源占用较少,不需要额外的硬件模块。便于调试和扩展:可以轻松修改通信协议,适合一些特殊的通信需求。缺点:
效率较低:软件串口比硬件串口慢,因为它需要依赖主处理器来处理时序,且需要精确的时延控制,容易受主处理器负载影响。占用CPU资源:由于需要精确的时序控制,软件串口通信会消耗较多的CPU周期,尤其是在高波特率时。受时钟漂移影响大:由于没有硬件支持,时序可能受到系统时钟漂移的影响,需要时常校准。
菜鸟下载发布此文仅为传递信息,不代表菜鸟下载认同其观点或证实其描述。
相关文章
更多>>












热门游戏
更多>>




热点资讯
更多>>热门排行
更多>>- 天道仙尊游戏版本排行榜-天道仙尊游戏合集-2023天道仙尊游戏版本推荐
- 灵汐缘2手游2023排行榜前十名下载_好玩的灵汐缘2手游大全
- 口袋觉醒题材手游排行榜下载-有哪些好玩的口袋觉醒题材手机游戏推荐
- 龙之神途手游排行榜-龙之神途手游下载-龙之神途游戏版本大全
- 梦中的你手游排行榜-梦中的你手游下载-梦中的你游戏版本大全
- 永恒战士排行榜下载大全-2023最好玩的永恒战士前十名推荐
- 炎黄大陆手游排行榜-炎黄大陆手游下载-炎黄大陆游戏版本大全
- 山海夜行手游2023排行榜前十名下载_好玩的山海夜行手游大全
- 类似白蛇问仙的手游排行榜下载-有哪些好玩的类似白蛇问仙的手机游戏排行榜
- 荒岛生存最新排行榜-荒岛生存手游免费版下载-荒岛生存免费破解版下载
- 圣武逍遥手游2023排行榜前十名下载_好玩的圣武逍遥手游大全
- 一念永恒最新排行榜-一念永恒手游免费版下载-一念永恒免费破解版下载