让机器人在人群中穿梭自如,港科广 & 港科大突破社交导航盲区
在复杂环境中,机器人社交导航能力至关重要。社交导航 (socialnav) 指机器人遵循社会规范在人
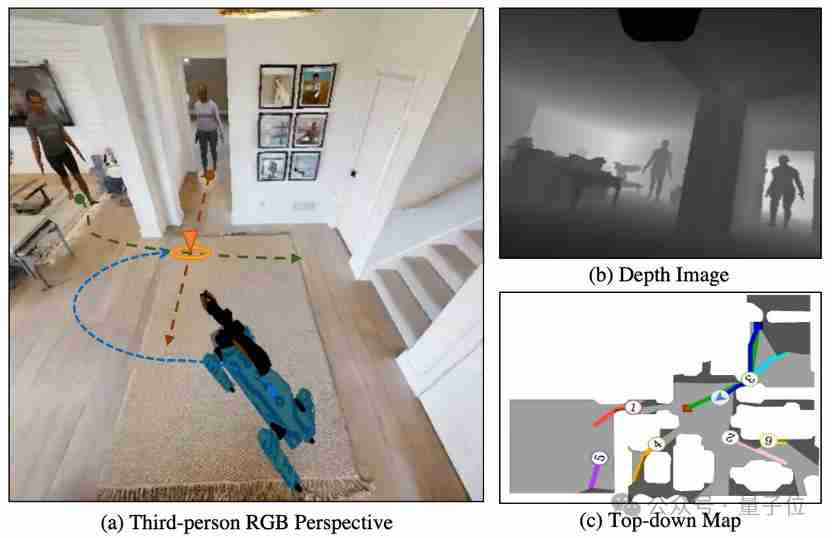
在复杂环境中,机器人社交导航能力至关重要。社交导航 (socialnav) 指机器人遵循社会规范在人机共存环境中导航。例如,机器人需要到达目标点,但目标点位于行人未来轨迹的交叉区域,机器人必须灵活避障并保持安全社交距离。
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
传统方法难以应对动态环境,为此,香港科技大学(广州)和香港科技大学提出了一种新算法 Falcon。该算法将轨迹预测融入社交导航,实现长期动态避障,提升导航性能。

现有社交导航基准存在场景简化、行为不自然等问题。

因此,研究团队构建了 Social-HM3D 和 Social-MP3D 两个新数据集,作为更真实的社交导航基准。这两个数据集基于真实场景重建,模拟自然人类行为,并控制人群密度。
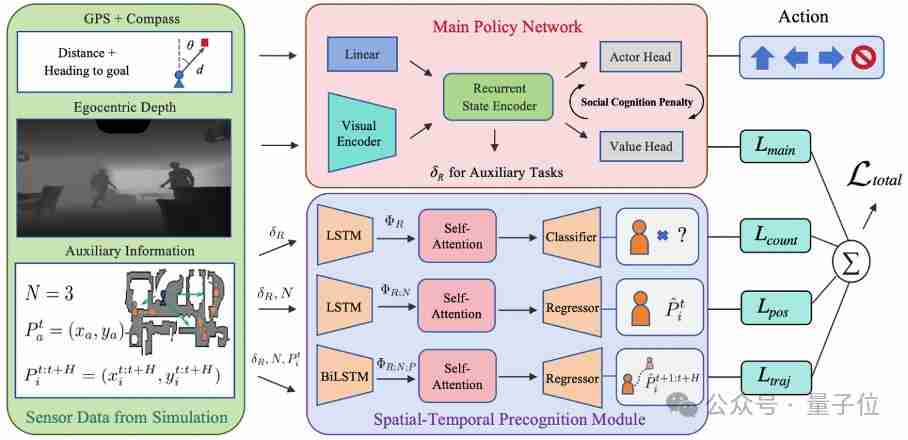
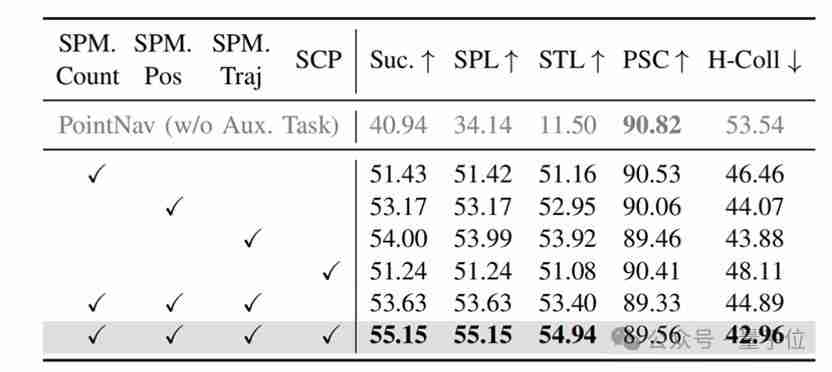
Falcon 算法框架由主策略网络 (MPN) 和时空预知模块 (SPM) 两部分组成。MPN 引入社会认知惩罚 (SCP) 机制,避免机器人干扰行人轨迹;SPM 则结合轨迹预测等辅助任务,增强对环境动态变化的预测能力。
现有模拟器与数据集对比:

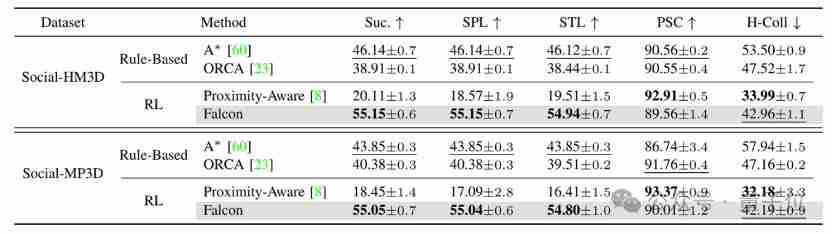
实验结果表明,Falcon 在目标达成率和社会合规性方面表现出色,在 Social-HM3D 数据集上达到 55.15% 的成功率和 SPL,在 Social-MP3D 数据集上达到 55.05% 的成功率,同时保持接近 90% 的 PSC 和接近 42% 的人机碰撞率。
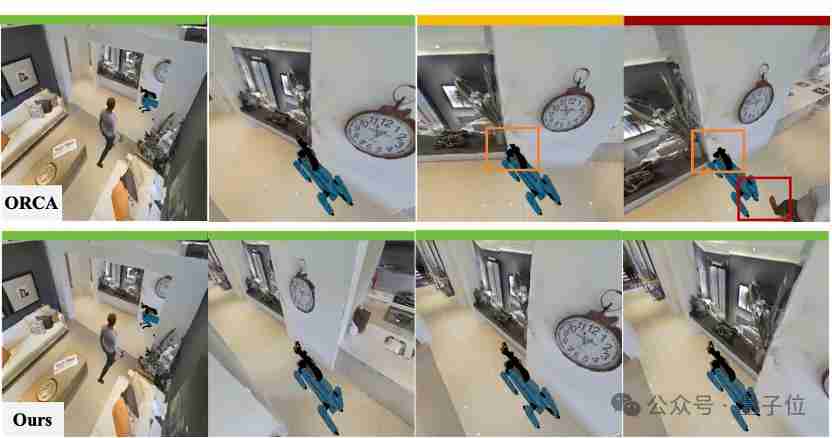
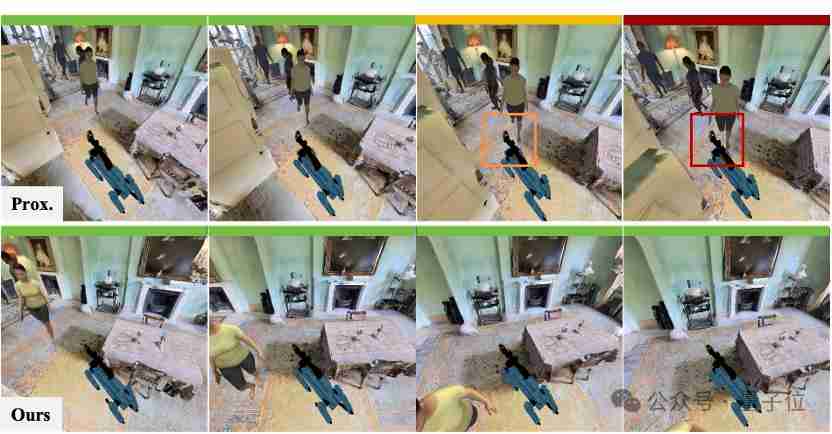
定性分析展示了 Falcon 在不同场景下的优势:
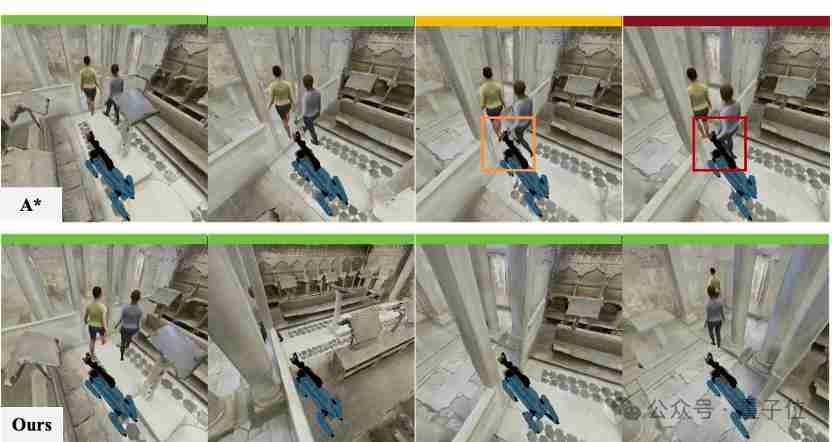
研究团队总结了三个关键发现:未来感知算法优于实时感知算法;轨迹预测等辅助任务提升性能;SCP 和 SPM 相辅相成,提升性能并加快训练收敛。

项目主页:https://www.php.cn/link/7e00cda28df36131e359f285250948f4论文链接:https://www.php.cn/link/314e6ef5dee5ca3a61707d40a0e08d76代码链接:https://www.php.cn/link/256e0d8b172aca7a31644ee25cc5bdee

菜鸟下载发布此文仅为传递信息,不代表菜鸟下载认同其观点或证实其描述。

相关文章
更多>>










热门游戏
更多>>




热点资讯
更多>>热门排行
更多>>- 天道仙尊游戏版本排行榜-天道仙尊游戏合集-2023天道仙尊游戏版本推荐
- 灵汐缘2手游2023排行榜前十名下载_好玩的灵汐缘2手游大全
- 口袋觉醒题材手游排行榜下载-有哪些好玩的口袋觉醒题材手机游戏推荐
- 龙之神途手游排行榜-龙之神途手游下载-龙之神途游戏版本大全
- 梦中的你手游排行榜-梦中的你手游下载-梦中的你游戏版本大全
- 永恒战士排行榜下载大全-2023最好玩的永恒战士前十名推荐
- 炎黄大陆手游排行榜-炎黄大陆手游下载-炎黄大陆游戏版本大全
- 山海夜行手游2023排行榜前十名下载_好玩的山海夜行手游大全
- 类似白蛇问仙的手游排行榜下载-有哪些好玩的类似白蛇问仙的手机游戏排行榜
- 荒岛生存最新排行榜-荒岛生存手游免费版下载-荒岛生存免费破解版下载
- 圣武逍遥手游2023排行榜前十名下载_好玩的圣武逍遥手游大全
- 一念永恒最新排行榜-一念永恒手游免费版下载-一念永恒免费破解版下载